Passive RC- und RL-Tiefpässe
Im Gegensatz zum realen Wirkwiderstand R sind die Blindwiderstände eines Kondensators (Kapazität) XC oder einer Spule (Induktivität) XL immer von der Frequenz der angelegten Spannung abhängig. Dieses Kapitel beschreibt das Verhalten passiver RC- und RL-Reihenschaltungen an sinusförmiger Spannung. Es handelt sich um frequenzabhängige Spannungsteiler. Entsprechende aktive Schaltungen sind an anderer Stelle als Integrierverstärker beschrieben. Beide Schaltungen haben mit dem kapazitiven oder induktiven Widerstand ein unabhängiges Speicherglied und werden als passive Filter 1. Ordnung bezeichnet.
Im niedrigen Frequenzbereich unterhalb 1 MHz können die meisten Bauformen der Wirkwiderstände R als von der Frequenz unabhängig angenommen werden. Mit zunehmender Frequenz nimmt der Wert eines kapazitiven Blindwiderstands ab während der eines induktiven Blindwiderstands zunimmt. Am RC-Spannungsteiler ist daher die Spannung parallel zum Kondensator bei tiefen Frequenzen groß und bei hohen Frequenzen klein. An einer RL-Reihenschaltung wird der gleiche Effekt erzielt, wenn die Ausgangsspannung parallel zum Wirkwiderstand gemessen wird. Für die folgenden Betrachtungen ist die Amplitude der Eingangsspannung für alle Frequenzen konstant.
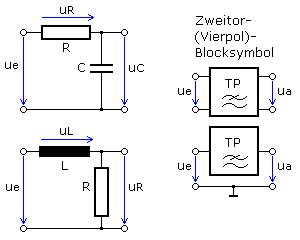
In der Elektronik werden Baugruppen entsprechend ihrer Funktion oft als Blocksymbole dargestellt. Die Darstellungsform, allgemein als Vierpol bezeichnet, ist für diese Schaltungen ein Zweitor, da die Ströme an den Eingangs- und Ausgangsklemmen gleich sind. Links ist das Eingangstor mit zwei Eingangspolen, rechts sind die zwei Pole des Ausgangstors. Liegen die unteren Pole auf einem gemeinsamen Potenzial, dem Massebezug der Schaltung, so können sie als ein Bezugspol dargestellt werden. Die eingetragenen Buchstaben oder Symbole kennzeichnen die Eigenschaften des Vierpols.
Tiefpass-Schaltungen finden breite Anwendung in empfindlichen elektronischen Geräten, um hochfrequente Störungen zu unterdrücken und eine saubere Signalverarbeitung zu ermöglichen. Insbesondere in industriellen oder feuchten Umgebungen können externe Einflüsse wie Feuchtigkeit, Staub oder mechanische Belastungen jedoch zu Störungen oder Funktionsausfällen führen.
Eine bewährte Schutzmaßnahme für Tiefpass-Schaltungen ist das Vergießen mit Gießharz für Elektronik. Durch den Einsatz von Epoxid- oder Polyurethan-Gießharzen lassen sich die Schaltungen elektrisch isolieren, mechanisch stabilisieren und vor Umwelteinflüssen schützen. Besonders in der Leistungselektronik ist es wichtig, die thermische Ausdehnung der Bauteile zu berücksichtigen, da sich unterschiedliche Materialien bei Erwärmung unterschiedlich verhalten können.
Zusätzlich reduziert das Gießharz die Feuchtigkeitsaufnahme, wodurch die Kapazitätsstabilität des Kondensators erhalten bleibt und unerwünschte Frequenzänderungen vermieden werden. Gerade bei Präzisionsmessgeräten oder langlebigen industriellen Anwendungen trägt der Verguss entscheidend zur Funktionssicherheit bei.
Die Grenzfrequenz
Im Zeigerdiagramm ist der Phasenwinkel zwischen der Realkomponente, das ist der Wirkwiderstand R und der Blindkomponente für XC oder XL immer 90°. Die Eingangsspannung Ue liegt an beiden Widerständen, der Impedanz an. Der Strom ist in der Reihenschaltung für alle Bauteile gleich und die Bezugsgröße. Der Stromzeiger wird in die horizontale Richtung der Realwert-Achse gelegt. Am Wirkwiderstand ist zwischen Strom und Spannung kein Phasenwinkel messbar. Der Zeiger für die Spannung UR liegt horizontal. Am ideal angenommenen Blindwiderstand ist für XC ein Phasenwinkel von 90° messbar und die Spannung eilt dem Strom nach. Dieser Zeiger zeigt senkrecht nach unten. Am ideal angenommenen Blindwiderstand XL eilt die Spannung dem Strom um 90° voraus. Dieser Zeiger weist senkrecht nach oben.
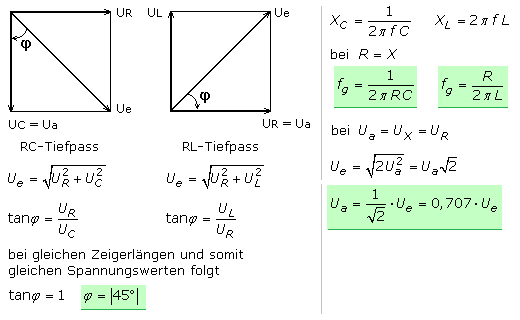
Die Zeiger für den Real- und Blindwert bilden die Katheten eines rechtwinkligen Dreiecks. Die geometrische Addition der Spannungszeiger ist die Hypotenuse deren Länge der Eingangsspannung entspricht. Für das rechtwinklige Dreieck kann der Satz des Pythagoras angewendet werden. Für den RC-Tiefpass und den RL-Tiefpass gelten: \[{U_e} = \sqrt {U_R^2 + U_C^2} \quad \quad \quad {U_e} = \sqrt {U_R^2 + U_L^2} \] Im rechtwinkligen Dreieck kann der Phasenwinkel zwischen der Eingangs- und Ausgangsspannung mithilfe der Tangensfunktion bestimmt werden. Für den Tiefpass- und Hochpass gelten: \[\tan \varphi = \frac{{{U_R}}}{{{U_C}}}\quad \quad \quad \quad \tan \varphi = \frac{{{U_L}}}{{{U_R}}}\] Nur der Blindwiderstand ist von der Frequenz abhängig, daher werden bei nur einer bestimmten Frequenz beide Teilspannungen den gleichen Wert und die gleiche Zeigerlänge haben. Der Phasenwinkel hat bei dieser Grenzfrequenz den Wert φ = 45° Für die beiden Tiefpässe gilt: \[\begin{array}{l} R = {X_C} = {X_L}\\ {X_C} = \frac{1}{{2\,\pi \,f\,C}}\quad \Rightarrow \quad {f_g} = \frac{1}{{2\,\pi \,R\,C}}\\ {X_L} = 2\,\pi \,f\,L\quad \Rightarrow \quad {f_g} = \frac{R}{{2\,\pi \,L}} \end{array}\]
Für sinusförmige Eingangsspannungen kann mit der Übertragungsfunktion, dem Verhältnis der Ausgangsspannung bezogen auf die Eingangsspannung das von der Frequenz abhängige Verhalten der Schaltung sehr einfach beurteilt werden.
Übertragungsfunktion für einen RC-Tiefpass
Die Eingangsspannung Ue liegt an der Impedanz Z der Reihenschaltung, die gleich der geometrischen Addition beider Teilwiderstände ist. Die Ausgangsspannung Ua wird beim RC-Tiefpass parallel zum Blindwiderstand Xc abgenommen. Um unterschiedlich dimensionierte Schaltungen einfacher vergleichen zu können, wird das Spannungsverhältnis wird auf die Ausgangsspannung normiert. Ihr Wert kann maximal nur 1 werden. Die Übertragungsfunktion leitet sich mit wenigen Umformungen aus dem Spannungsverhältnis her. \[\frac{{{U_a}}}{{{U_e}}} = \frac{{{X_C}}}{Z} = \frac{{{X_C}}}{{\sqrt {{R^2} + X_C^2} }} = \frac{1}{{\frac{1}{{{X_C}}}\sqrt {{R^2} + X_C^2} }}\] \[\frac{{{U_a}}}{{{U_e}}} = \frac{1}{{\sqrt {\frac{1}{{X_C^2}}({R^2} + X_C^2)} }} = \frac{1}{{\sqrt {1 + {{\left( {\frac{R}{{{X_C}}}} \right)}^2}} }}\] Einsetzen der Formel für den Blindwiderstand des Kondensators ergibt die Übertragungsfunktion für den RC-Tiefpass: \[\frac{{{U_a}}}{{{U_e}}} = \frac{1}{{\sqrt {1 + {{(2\,\pi \,f\,R\,C)}^2}} }}\quad (1)\] Bei der Grenzfrequenz fg haben beide Bauteile den gleichen Widerstandswert. Für die Ausgangsspannung gilt: \[R = {X_C}\quad \Rightarrow \quad \frac{{{U_a}}}{{{U_e}}} = \frac{1}{{\sqrt 2 }}\quad \quad {U_a} \approx 0,707 \cdot {U_e}\] Werden bei der Gl.(1) Grenzwertbetrachtungen für die Frequenz durchgeführt, dann folgt: \[\begin{array}{l} f \to 0\quad \quad {(2\,\pi \,f\,R\,C)^2} \to 0\quad \quad \frac{{{U_a}}}{{{U_e}}} \to 1\\ f \to \infty \quad \quad {(2\,\pi \,f\,R\,C)^2} \to \infty \quad \quad \frac{{{U_a}}}{{{U_e}}} \approx \frac{1}{{\sqrt \infty }} \approx 0 \end{array}\] Bei der Grenzfrequenz hat das Ausgangssignal noch knapp 71% des Eingangssignals. Sehr tiefe Signalfrequenzen passieren die Schaltung fast ungedämpft. Sehr hohe Signalfrequenzen gelangen an den Ausgang stark gedämpft.
Übertragungsfunktion mit komplexer Wechselstromrechnung
Oft sind Herleitungen mithilfe der komplexen Wechselstromrechnung einfacher und übersichtlicher. In diesem Webprojekt sind Beschreibungen zum komplexen Achsensystem und zur komplexen Rechnung ebenso wie die Zusammenhänge zwischen den Blindwiderständen und ihren Operatoren und Leitwerten im Bereich der Fachmathematik zu finden.
Die Übertragungsfunktion G(jω) oder G(s) wird auch als H(jω) oder H(s), geschrieben und mit den Operatoren aufgestellt. Die komplexen Größen sind mit einem Unterstrich gekennzeichnet. Es wird wie zuvor auf die Ausgangsspannung normiert, sodass im Zähler der Wert 1 steht. In Veröffentlichungen gibt es unterschiedliche Vereinfachungen. Anstelle von RC wird die Zeitkonstante \(\tau = R \cdot C\) verwendet oder für den Faktor j·ω wird \(s = j \cdot \omega \) eingesetzt. Sehr oft wird auf die Grenzfrequenz normiert, sodass die Frequenzachse jetzt Werte für \(\Omega = f/{f_g} = \omega /{\omega _g}\) den Bereich 0 ... ∞ durchläuft und bei der Grenzfrequenz den Wert Ω = 1 hat. Es folgt die Herleitung für einen RC-Tiefpass. \[{\underline G _{j\omega }} = \frac{{{{\underline U }_a}}}{{{{\underline U }_e}}} = \frac{{\frac{1}{{j\,\omega \,C}}}}{{R + \frac{1}{{j\,\omega \,C}}}}\] Mit der Normierung und je nach Wahl der vereinfachenden Ersetzung folgt: \[\underline G (j\omega ) = \frac{1}{{1 + j\,\omega \,R\,C}}\quad \quad \underline G (s) = \frac{1}{{1 + s\,R\,C}}\] Mit \(R\,C = 1/{\omega _g}\) und \(\omega = \Omega \,{\omega _g}\) eingesetzt folgt: \[\underline G (j\omega ) = \frac{1}{{1 + j\,\Omega }} = \frac{{1 - j\,\Omega }}{{(1 + j\,\Omega )(1 - j\,\Omega )}} = \frac{{1 - j\,\Omega }}{{1 + {\Omega ^2}}}\] In die Real- und Imaginärkomponente aufgetrennt geschrieben: \[\underline G (j\omega ) = \frac{1}{{1 + {\Omega ^2}}} - \left( {\frac{\Omega }{{1 + {\Omega ^2}}}} \right) \cdot j\] Der Amplitudenfrequenzgang berechnet sich wie folgt: \[\begin{array}{l} \left| {\underline G (j\omega )} \right| = \sqrt {{{{\mathop{\rm Re}\nolimits} }^2} + {{{\mathop{\rm Im}\nolimits} }^2}} \\ \left| {\underline G (j\omega )} \right| = \sqrt {{{\left( {\frac{1}{{1 + {\Omega ^2}}}} \right)}^2} + {{\left( {\frac{{ - \Omega }}{{1 + {\Omega ^2}}}} \right)}^2}} = \sqrt {\frac{{1 + {\Omega ^2}}}{{{{(1 + {\Omega ^2})}^2}}}} \end{array}\] \[\left| {\underline G (j\omega )} \right| = \frac{1}{{\sqrt {1 + {\Omega ^2}} }}\] Bei der Grenzfrequenz ist Ω = 1 und die Signalamplitude am Ausgang beträgt |G|≈0,707... Für den Phasenfrequenzgang gilt: \[\varphi (j\omega ) = {\mathop{\rm arc}\nolimits} \,tan\left( {\frac{{{\mathop{\rm Im}\nolimits} }}{{{\mathop{\rm Re}\nolimits} }}} \right) = \arctan \left( {\frac{{\frac{{ - \Omega }}{{1 + {\Omega ^2}}}}}{{\frac{1}{{1 + {\Omega ^2}}}}}} \right)\] \[\varphi (j\omega ) = - {\mathop{\rm arc}\nolimits} \,tan(\Omega )\] Der Phasenwinkel ist bei einem RC-Tiefpass negativ und bei der Grenzfrequenz mit Ω = 1 beträgt der Winkel \(\varphi = - {45^o}\quad \)
Übertragungsfunktion für einen RL-Tiefpass
Die Eingangsspannung liegt an der Gesamtimpedanz Z der Reihenschaltung aus R und L. Die Ausgangsspannung wird beim RL-Tiefpass parallel zum Wirkwiderstand abgegriffen. Die nicht komplexe mathematische Herleitung der Übertragungsfunktion entspricht angepasst den Schritten wie beim RC-Tiefpass. \[\begin{array}{l} \frac{{{U_a}}}{{{U_e}}} = \frac{R}{Z} = \frac{R}{{\sqrt {{R^2} + X_L^2} }}\\ \frac{{{U_a}}}{{{U_e}}} = \frac{1}{{\frac{1}{R}\sqrt {{R^2} + X_L^2} }} = \frac{1}{{\sqrt {\frac{1}{{{R^2}}}({R^2} + X_L^2)} }} \end{array}\] \[\frac{{{U_a}}}{{{U_e}}} = \frac{1}{{\sqrt {1 + {{\left( {\frac{{{X_L}}}{R}} \right)}^2}} }} = \frac{1}{{\sqrt {1 + {{\left( {\frac{{2\,\pi \,f\,L}}{R}} \right)}^2}} }}\quad (2)\] Die Grenzwertbetrachtungen für den Frequenzbereich ergeben: \[\begin{array}{l} f \to 0\quad \quad \frac{{2\,\pi \,f\,L}}{R} \to 0\quad \quad \frac{{{U_a}}}{{{U_e}}} \to 1\\ f \to \infty \quad \quad \frac{{2\,\pi \,f\,L}}{R} \to 0\quad \quad \frac{{{U_a}}}{{{U_e}}} \approx \frac{1}{\infty } \approx 0 \end{array}\] Der Bereich tiefer Signalfrequenzen wird wenig gedämpft, je höher die Signalfrequenz wird, desto geringer ist die Ausgangsamplitude. Das entspricht dem Tiefpassverhalten.
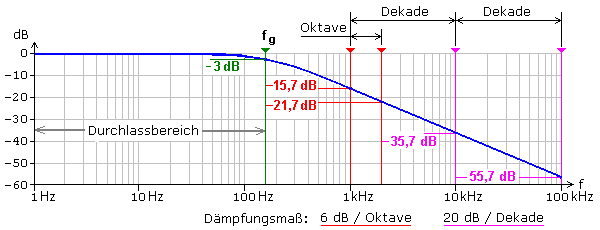
Zur grafischen Darstellung des Amplituden-Frequenzgangs wird anstelle des Spannungsverhältnisses oft das Pegelmaß verwendet. Im Sperrbereich weit genug oberhalb der Grenzfrequenz ist der Kurvenverlauf linear fallend. Das Dämpfungsmaß errechnet sich aus der Steigung. Der charakteristische Wert für einen passiven Tiefpass 1. Ordnung beträgt 6 dB pro Oktave. Das entspricht einer Frequenzverdoppelung. Im linearen Abschnitt der Dämpfung und dem Zehnfachen des Frequenzbereichs beträgt das Dämpfungsmaß 20 dB pro Dekade.
Beim RC-Tiefpass wird die Ausgangsspannung am Kondensator abgegriffen.
Beim RL-Tiefpass wird die Ausgangsspannung am Widerstand abgegriffen.
Eingangssignale mit tiefen Frequenzen durchlaufen die Schaltung fast ungehindert.
Mit steigender Eingangsfrequenz wird die Ausgangsamplitude stetig kleiner.
Bei der Grenzfrequenz fg gilt Ua = 0,707·Ue.
Die Dämpfung beträgt 3 dB, die Verstärkung −3 dB.
Bei fg ist das Ausgangssignal um φ = −45° zum Eingangssignal phasenverschoben.
Bei f » fg beträgt die Dämpfung 6 dB/Oktave das entspricht 20 dB/Dekade.
Herleitung mit komplexer Wechselstromrechnung
Auch diese Herleitung entspricht angepasst den Schritten des RC-Tiefpasses. Das Ausgangssignal wird am Wirkwiderstand abgenommen und das Eingangssignal liegt an der Impedanz, der Reihenschaltung aus dem induktiven Blindwiderstand und dem Wirkwiderstand. Es wird auf das Ausgangssignal normiert, sodass der Zähler den Wert 1 hat. \[\underline G (j\omega ) = \frac{{{{\underline U }_a}}}{{{{\underline U }_e}}} = \frac{R}{{R + j\,\omega \,L}} = \frac{1}{{1 + j\,\omega \,\frac{L}{R}}}\] Mit \({\omega _g} = R/L\) und \(\Omega = f/{f_g} = \omega \,L/R\) eingesetzt in die Formel ergibt: \[\underline G (j\omega ) = \frac{1}{{1 + \Omega \,j}} = \frac{{1 - \Omega \,j}}{{(1 + \Omega \,j)(1 - \Omega \,j)}} = \frac{{1 - \Omega \,j}}{{1 + {\Omega ^2}}}\] Getrennt als Real- und Imaginärkomponente geschrieben ergibt: \[\underline G (j\omega ) = \frac{1}{{1 + {\Omega ^2}}} - \left( {\frac{\Omega }{{1 + {\Omega ^2}}}} \right) \cdot j\] Daraus folgen für den Amplituden- und Phasenfrequenzgang die Beziehungen: \[\left| {\underline G (j\omega )} \right| = \frac{1}{{\sqrt {1 + {\Omega ^2}} }}\quad \quad \varphi (j\omega ) = - {\mathop{\rm arc}\nolimits} \,tan(\Omega )\]
Die hergeleiteten Eigenschaften gelten für einen unbelasteten Pass, wo der Innenwiderstand der Signalquelle und der Eingangswiderstand einer Folgestufe praktisch vernachlässigbar bleiben. In einer mehrstufigen Schaltung kann das durch vor- und nachgeschaltete Impedanzwandler erreicht werden. Sie werden zumeist als Pufferverstärker (engl. Buffer) bezeichnet. Ohne diese Entkopplung wird der Pass belastet, wobei die maximal erreichbare Ausgangsspannung geringer ist und die zuvor berechnete Grenzfrequenz einen anderen Wert annimmt. Auf der Seite zum belasteten RC-Pass werden diese Einflüsse mit mathematischen Herleitungen beschrieben.