Differenzialrechnung
Die Differenzialrechnung (Differentialrechnung) ist eine mathematische Methode mit der viele Eigenschaften mathematischer Funktionen und deren grafischen Darstellungen bestimmt werden können. Zu diesen Eigenschaften gehören die Steigung und das Steigungsverhalten, Extremalpunkte, Wende- und Sattelpunkte, der Krümmungsverlauf und das Monotonieverhalten. Im Mathematikunterricht wird in diesem Zusammenhang auch die Bestimmung von Nullstellen behandelt. Das sind Schnitt- oder Berührpunkte mit der horizontalen x-Achse und der Schnittpunkt mit der y-Achse. Die ebenfalls behandelte Punkt- und Achsensymmetrien kommen ohne Differenzialrechnung aus und können Teil einer späteren Kurvendiskussion sein.
Der Funktionsbegriff
Die bildliche Darstellung mathematischer Zusammenhänge erfolgt in den meisten Fällen im ebenen oder räumlichen rechtwinkligen Achsensystem. Das Funktionsbild, der Funktionsgraph, kann zwischen den Achsenebenen verlaufen, sie schneiden oder berühren. In der Mathematik wird die vertikale Achse meistens als y-Achse und die horizontale Achse als x-Achse bezeichnet. Andere Problemstellungen nutzen ihre eigenen Achsenbezeichnungen, wie beispielsweise ein Weg-Zeit-Diagramm oder Strom-Spannungs-Diagramm. Die Werte auf der horizontalen x-Achse gehören zum Definitionsbereich der Funktion. Die x-Achse wird auch als Abszissenachse bezeichnet. Die vertikale y-Achse ist die Ordinatenachse und enthält die Werte für den Wertebereich der Funktion. Im räumlichen Achsensystem steht die z-Achse senkrecht auf der Ebene, die von der x- und y-Achse aufgespannt wird.
Für eine Funktion f gibt es die Zuordnungsvorschrift \(f:D \to W\). Jedes Element aus dem Definitionsbereich \(x \in D\) ist mit nur einem Element aus dem Wertebereich \(y \in W\) verbunden. Ein gewählter Wert auf der x-Achse, der Abszisse (Abschnitt), bestimmt den zugehörigen Wert auf der y-Achse, der Ordinate (Zuordnung). Die unabhängige und veränderliche Variable ist x. Die davon abhängige veränderliche Variable ist der Funktionswert y. Für die Zuordnung gilt allgemein: \(f:x \mapsto y\). Oft werden die Funktionswerte mit Formeln \(y = f(x)\) berechnet, mit der Bedeutung, dass y eine Funktion von x ist. Die Zuordnung kann auch als \(f:x \mapsto f(x)\) geschrieben werden. Ist diese Zuordnung umkehrbar, dann ist ihre Eigenschaft eineindeutig. Für Kreise, Ellipsen oder Spiralen gibt es keine entsprechend eindeutigen Zuordnungsvorschriften. Im Folgenden werden nur reelle Werte betrachtet.
Beispiele
Die Rechenvorschrift \(y = f(x) = 2x - 1\) erfüllt die Zuordnung für eine Geradenfunktion. Mit dem Definitionsbereich \(D = \{ - 2, - 1,0, + 1, + 2, + 3\} \) ergibt sich in eindeutiger Zuordnung ein Wertebereich \(W = \{ - 5, - 3, - 1, + 1, + 3, + 5\} \). Die Funktion ist eineindeutig, da jedem Wert des Wertebereichs nur ein Wert des Definitionsbereichs zugeordnet ist.
Bei der Parabel \(y = f(x) = {x^2} + x - 1\) ist die eindeutige Zuordnung eines x-Wertes aus der Definitionsmenge \(D = \{ - 3, - 2, - 1, - 0.5,0, + 1, + 2\} \) mit einem Wert in der Wertemenge \(W = \{ + 5, + 1, + 1, - 1, - 1.25, - 1, + 5\} \) erfüllt. Die Funktionsvorschrift ist erfüllt. Die Funktion ist nicht eineindeutig, da einige Werte aus der Wertemenge mehrfach mit Werten in der Definitionsmenge verbunden sind.
Das Abbild eines Kreises wird durch die Menge aller Punkte auf der Kreislinie beschrieben, die den gleichen Abstand vom Mittelpunkt haben. Für dieses Bild gibt es keine vollständige Funktionsgleichung. Für die Normalform der Kreisgleichung findet man in Formelsammlungen \({x^2} + {y^2} = {r^2}\). Wird die Gleichung nach y aufgelöst, ist zu erkennen, dass jeder x-Wert aus dem Definitionsbereich mit zwei y-Werten aus dem Wertebereich verbunden ist: \(y = \pm \sqrt {{r^2} - {x^2}} \). Die Kreisgleichung wird als Relation bezeichnet.
Nullstellenbestimmung bei Funktionen
Schneidet oder berührt der Funktionsgraph die x-Achse, dann ist der Funktionswert y = 0. Es liegt eine Nullstelle oder für bestimmte Funktionsgleichungen ein Berührpunkt, eine Doppelnullstelle vor. Ist die Funktionsgleichung bekannt so wird zur Berechnung der Nullstelle(n) der Funktionswert \(y = f(x) = 0\) gesetzt. Die Funktionsgleichung wird zur Bestimmungsgleichung für die x-Koordinate(n). Am einfachsten gilt das für Geraden- und Parabelfunktionen. Für Funktionen höherer Ordnung ist der Rechenaufwand entsprechend größer.
y-Achsenabschnitt bei Funktionen
Schneidet der Funktionsgraph die y-Achse, dann ist immer die x-Koordinate (x-Wert) des Schnittpunkts null. Hat die gegebene Funktion ein von x unabhängiges lineares Glied, so ist sein Wert gleich dem y-Achsenabschnitt.
Symmetrien
Im schulischen Bereich wird nur die Achsen- und Punktsymmetrie betrachtet. Ist eine Funktion spiegelsymmetrisch zur y-Achse, dann dürfen nur geradzahlige Exponenten der unabhängigen Variablen x in der Funktionsgleichung vorkommen. Für alle x gilt dann \(x \in D \Leftrightarrow - x \in D\). Der mathematische Nachweis muss die Gleichung \(f( - x) = f(x)\) erfüllen.
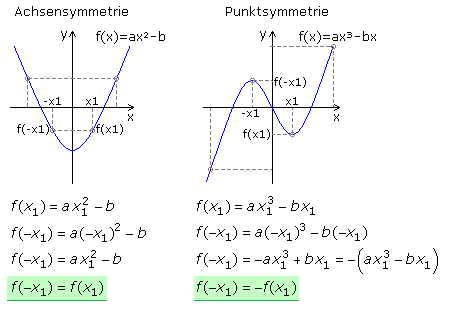
Wird in die Funktionsgleichung des linken Funktionsbilds für die Variable x der positive oder negative Wert eingesetzt, dann ist das Ergebnis gleich und es besteht Achsensymmetrie. \[\begin{array}{l} y = f(x) = a\,x_1^2 - b\\ f({x_1}) = a\,x_1^2 - b\\ f( - {x_1}) = a\,( - x_1^2) - b = a\,x_1^2 - b\\ f( - {x_1}) = f({x_1}) \end{array}\] Im Bildteil rechts gibt es in der Funktionsgleichung nur ungeradzahlige Exponenten der x-Variablen. Das Funktionsbild ist zum Koordinatenursprung punktsymmetrisch. Die Funktionsgleichung darf kein absolutes Glied haben, denn dieses hätte mit \({x^0}\) einem geraden Exponenten. Ohne absolutes Glied gilt für alle x \(x \in D \Leftrightarrow - x \in D\). Für die Punktsymmetrie gilt: \[\begin{array}{l} y = f(x) = a\,{x^3} - b\,x\\ f({x_1}) = a\,x_1^3 - b\,{x_1}\\ f( - {x_1}) = a\,( - x_1^3) + b\,{x_1} = - (a\,x_1^3 - b\,{x_1})\\ f( - {x_1}) = - f({x_1}) \end{array}\]
Monotonie
Der Funktionsverlauf kann bei positiver Steigung monoton wachsend oder bei negativer Steigung monoton fallend sein. Da im Funktionsverlauf die Steigung auch gleich bleiben kann, wird das Verhalten der Monotonie durch den Zusatz streng noch genauer spezifiziert. Für alle x-Werte des Definitionsbereichs mit \({\rm{x1 \lt x2}}\) ist die Funktion monoton wachsend, wenn \(f({x_1}) \le f({x_2})\) gilt. Bei einer streng monoton wachsenden Funktion gilt: \(f({x_1}) \lt f({x_2})\). Bei einer monoton fallenden Funktion ist \(f({x_1}) \ge f({x_2})\) erfüllt und für streng monoton fallend muss \(f({x_1}) > f({x_2})\) sein. Die Monotonie kann für die gesamte Funktion gelten oder wird für einzelne Funktionsabschnitte bestimmt.
Vom Differenzen- zum Differenzialquotient
Der Funktionsgraph einer Geraden wird durch eine Funktionsgleichung beschrieben, in der die Variable nur in der ersten Potenz vorkommt. Die Funktionsgleichung wird als Polynom 1. Grades bezeichnet. Für jeden gewählten Abschnitt des Funktionsbilds ist die Steigung konstant. Im Kapitel über die Gerade wird gezeigt, wie die Steigung aus dem Differenzenquotienten Δy / Δx ermittelt werden kann. Funktionen höherer Ordnung haben in jedem Punkt ihres Funktionsbilds fast immer unterschiedliche Steigungswerte. Zeichnerisch (grafisch) kann die Steigung für einen bestimmten Kurvenpunkt durch das Anlegen und Zeichnen einer Tangente bestimmt werden. Die Tangentensteigung ist durch ihren Differenzenquotienten bestimmbar.
Die grafisch weniger genaue Bestimmung wird durch die Differenzialrechnung zur optimalen Methode. Mit ihr lassen sich Steigungen für jeden Kurvenpunkt auch nicht linearer Funktionsbilder direkt und genau bestimmen, wenn die gegebene Funktion differenzierbar ist. Die Gerade, die durch zwei nahe beieinanderliegende Kurvenpunkte geht, heißt Sekante. Ihre Steigung ist aus dem Differenzenquotienten unter Verwendung der beiden Kurvenpunktkoordinaten bestimmbar. Wandert ein Punkt P entlang des Funktionsgraphen auf einen feststehenden Kurvenpunkt P1 zu, so geht die Sekante beim Erreichen von P1 in die Tangente über.
Die Tangente im Kurvenpunkt P1 wird als Grenzlage verstanden. Die Sekanten durch den festen Punkt P1 und einem weiteren Kurvenpunkt P, der sich P1 nähert, verändern ihre Steigung. Fallen beide Punkte zusammen, dann sind Sekanten- und Tangentensteigung in P1 als Grenzwert gleich. Im folgenden Videoclip wird dieser Übergang nacheinander für vier Kurvenpunkte schrittweise dargestellt. Eine individuelle Steuerung ist nur mithilfe der einblendbaren Controlleiste möglich.
Es ist vorstellbar, dass sich zu einem ausgewählten Kurvenpunkt P1 Sekanten zeichnen lassen, deren zweiter Kurvenpunkt rechts oder links von P1 liegt. Die Steigungen der Sekanten stehen für einen Mittelwert zum gesuchten momentanen Wert der Steigung für die Tangente für P1. Ergeben beide Steigungsfolgen der Sekanten von rechts und links kommend beim Grenzübergang, wo der Differenzenquotient in den Differenzialquotienten übergeht, den gleichen Grenzwert, so ist die betrachtete Funktion an der Stelle P1 differenzierbar.
Die Funktion f(x) ist im Definitionsbereich stetig. Sie ist an jeder Stelle differenzierbar, wenn für jeden Kurvenpunkt der rechts- und linksseitige Grenzwert gleich der Tangentensteigung in diesem Kurvenpunkt ist. Für f(x) existiert eine Ableitungsfunktion f ' (x), die den Wert der Steigung für jeden Kurvenpunkt bestimmt.
Grenzwertbestimmung
Die folgende Darstellung zeigt den Ausschnitt eines Funktionsgraphen. Die Tangentensteigung im Punkt P(xo/yo) wird durch den Übergang vom Differenzen- zum Differenzialquotienten bestimmt. Dazu ist oberhalb von P ein weiterer Punkt Q eingezeichnet, der um den x-Achsenabschnitt Δx entfernt liegt. Mit diesem Wert errechnet sich der Funktionswert zu f(xo + Δx). An der Stelle P ist der Funktionswert f(xo). Durch die Punkte P und Q verläuft die Sekante mit der Steigung Δy/Δx, die sich aus dem Steigungsdreieck ergibt. Nähert sich der Punkt Q dem Punkt P, so wird das mathematisch mithilfe der Grenzwertbildung durch den Limes, wo Δx gegen null strebt, beschrieben.
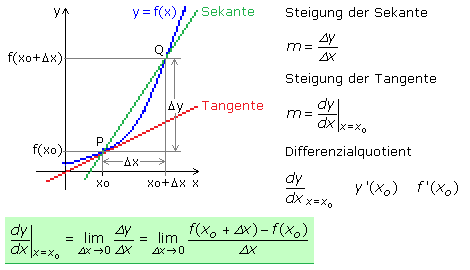
Für die Steigung der Sekante durch P und Q sowie die Steigung der Tangente im P gelten: \[m = \frac{{\Delta y}}{{\Delta x}}\quad \quad m = \frac{{dy}}{{dx}}{|_{x = {x_o}}}\] Wird der Differenzialquotient durch den Limes geschrieben, dann gilt: \[\frac{{dy}}{{dx}}{|_{x = {x_o}}} = \mathop {\lim }\limits_{\Delta x \to 0} \frac{{\Delta y}}{{\Delta x}} = \mathop {\lim }\limits_{\Delta x \to 0} \frac{{f({x_0} + \Delta x) - f({x_0})}}{{\Delta x}}\] Das folgende Beispiel zeigt die Anwendung der Grenzwertbildung für die Funktionsgleichung einer Geraden. Ihre Steigung ist in allen Kurvenpunkten konstant und entspricht somit auch dem Differenzenquotienten. Im Term des Differenzialquotienten kürzt sich Δx heraus, sodass die Grenzwertbildung nicht mehr notwendig wird: \[\begin{array}{l} y = f(x) = 3\,x + 5\\ \frac{{dy}}{{dx}}{|_{x = {x_o}}} = \mathop {\lim }\limits_{\Delta x \to 0} \frac{{3\,({x_0} + \Delta x) + 5 - (3\,{x_0} + 5)}}{{\Delta x}}\\ \frac{{dy}}{{dx}}{|_{x = {x_o}}} = \mathop {\lim }\limits_{\Delta x \to 0} \frac{{3\,{x_0} + 3\,\Delta x + 5 - 3\,{x_0} - 5}}{{\Delta x}}\\ \frac{{dy}}{{dx}}{|_{x = {x_o}}} = f'({x_0}) = 3 \end{array}\]
Der Rechenweg gilt auch für Funktionen höherer Ordnung. Das folgende Beispiel zeigt die Grenzwertbildung für eine Parabelfunktion, ein Polynom 2. Grades: \[\begin{array}{l} y = f(x) = 2\,{x^2} - 3\,x + 2\\ \frac{{dy}}{{dx}}{|_{x = {x_o}}} = \mathop {\lim }\limits_{\Delta x \to 0} \frac{{f({x_0} + \Delta x) - f({x_0})}}{{\Delta x}}\\ \frac{{dy}}{{dx}}{|_{x = {x_o}}} = \mathop {\lim }\limits_{\Delta x \to 0} \frac{{2\,{{({x_0} + \Delta x)}^2} - 3\,({x_0} + \Delta x) + 2 - (2\,x_0^2 - 3\,{x_0} + 2)}}{{\Delta x}}\\ \frac{{dy}}{{dx}}{|_{x = {x_o}}} = \mathop {\lim }\limits_{\Delta x \to 0} \frac{{2\,x_0^2 + 4\,{x_0}\Delta x + 2\,\Delta {x^2} - 3\,{x_0} - 3\,\Delta x + 2 - 2\,x_0^2 + 3\,{x_0} - 2}}{{\Delta x}}\\ \frac{{dy}}{{dx}}{|_{x = {x_o}}} = \mathop {\lim }\limits_{\Delta x \to 0} \frac{{4\,{x_0}\Delta x + 2\,\Delta {x^2} - 3\,\Delta x}}{{\Delta x}} = \mathop {\lim }\limits_{\Delta x \to 0} 4\,{x_0} + 2\,\Delta x - 3\\ \frac{{dy}}{{dx}}{|_{x = {x_o}}} = f'({x_0}) = 4\,{x_0} - 3 \end{array}\]
Im Videoclip ist der im 1. Quadranten verlaufende Ast der Hyperbel mit der Funktionsgleichung f(x) = 10/x dargestellt. Die Ableitfunktion für diese Stammfunktion kann ebenso ermittelt werden wie in den vorangegangenen Beispielen. Ein Vergleich mit den im Video ermittelten Tangentensteigungen und den mit der folgenden Ableitgleichung errechenbaren Werten für den ausgewählten Punkt zeigt die Richtigkeit des Verfahrens: \[\begin{array}{l} y = f(x) = \frac{{10}}{x}\\ \frac{{dy}}{{dx}}{|_{x = {x_o}}} = \mathop {\lim }\limits_{\Delta x \to 0} \frac{{f({x_0} + \Delta x) - f({x_0})}}{{\Delta x}}\\ \frac{{dy}}{{dx}}{|_{x = {x_o}}} = \mathop {\lim }\limits_{\Delta x \to 0} \frac{{\frac{{10}}{{{x_0} + \Delta x}} - \frac{{10}}{{{x_0}}}}}{{\Delta x}} = \frac{{10\,{x_0} - 10\,\,({x_0} + \Delta x)}}{{{x_0}\,({x_0} + \Delta x)}} \cdot \frac{1}{{\Delta x}}\\ \frac{{dy}}{{dx}}{|_{x = {x_o}}} = \mathop {\lim }\limits_{\Delta x \to 0} \frac{{ - 10\Delta x}}{{(x_0^2 + {x_0}\,\Delta x)\,\Delta x}}\\ \frac{{dy}}{{dx}}{|_{x = {x_o}}} = f'({x_0}) = - \frac{{10}}{{x_0^2}} \end{array}\]
Die Steigungsfunktion mithilfe der Grenzwertbildung zu berechnen ist umständlich, denn ein Vergleich zwischen der Polynomfunktion mit ihrer Ableitfunktion ist eine Bildungsregel zu erkennen. Für die gegebene Funktion wird der Exponent der Variablen als Faktor vor die Variable geschrieben und der Exponent um 1 erniedrigt. Da jede Konstante formal mit \({x^0} = 1\) multipliziert werden kann, ist das Ergebnis der Ableitung einer Konstante gleich null. Beispielhaft wird das für die quadratische Funktion gezeigt: \[\begin{array}{*{20}{l}} {f(x) = 2{\mkern 1mu} {x^2} - 3{\mkern 1mu} x + 2 = 2{\mkern 1mu} {x^2} - 3{\mkern 1mu} x + 2 \cdot {x^0}}\\ {f'(x) = 2{\mkern 1mu} \cdot 2{x^{2 - 1}} - 1 \cdot 3{\mkern 1mu} {x^{1 - 1}} + 0 \cdot 2{x^{0 - 1}} = 4{\mkern 1mu} x - 3{x^0} + 0}\\ {f'(x) = 4{\mkern 1mu} x - 3} \end{array}\] Für die 1. Ableitung gilt allgemein: \[f(x) = y = a\,{x^n}\quad \Rightarrow \quad f'(x) = y' = n\,a\,{x^{n - 1}}\]
Mit der Ableitungsfunktion kann an jeder Stelle x aus dem Definitionsbereich eines differenzierbaren Funktionsintervalls der Wert der Tangentensteigung für den Funktionswert ermittelt werden. Der Differenzialoperator d/dx angewendet auf die Ausgangsfunktion f(x) ergibt als 1. Ableitung der Ausgangsfunktion ihre Steigungsfunktion f'(x) = y'. Sollen zeitabhängige Funktionen in der Physik nach der Zeit als Variable abgeleitet werden, so wird die abgeleitete Größe sehr oft mit einem darüberstehenden Punkt und nicht wie in der Mathematik mit einem ' (Hochkomma) geschrieben.
Höhere Ableitungen
Hat die 1. Ableitung noch Potenzen von x (als Variable) größer null, so kann der Differenzialoperator erneut angewendet werden. Das Ergebnis ist die 2. Ableitung und somit die Steigungsfunktion der 1. Ableitung. Dieser Prozess kann wiederholt werden, solange in der höheren Ableitung die abzuleitende Variable noch enthalten ist. Durch mehrfaches Ableiten können die Eigenschaften von Funktionen höheren Grades eindeutig beschrieben werden. \[\begin{array}{l} 1.\,Ableitung\quad y' = f'(x) = \frac{{d\,y}}{{dx}} = \frac{d}{{dx}}[f(x)]\\ 2.\,Ableitung\quad y'' = f''(x) = \frac{{{d^2}y}}{{d{x^2}}} = \frac{d}{{dx}}[f'(x)]\\ 3.\,Ableitung\quad y''' = f'''(x) = \frac{{{d^3}y}}{{d{x^3}}} = \frac{d}{{dx}}[f''(x)] \end{array}\]