Flipflops – Binärspeicher
Die duale Digitaltechnik basiert auf den Grundzuständen Ein (1) und Aus (0) oder High (H) und Low (L). Das entspricht den beiden möglichen Ausgangssignalen bistabiler Kippstufen, den Flipflops. Deren prinzipielle Schaltungen mit Transistoren und dem Timer-IC 555 sowie die Arbeitsweise sind in diesem Webprojekt genauer beschrieben. Hier in der Digitaltechnik wird das Verhalten der Speicherglieder im Vordergrund stehen und bei Bedarf ist die interne Schaltung nur als Funktionsblöcke dargestellt.
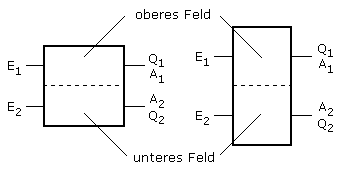
Für digitale Speicher und daraus abgeleitete Funktionsgruppen stehen diverse integrierte Bausteine (ICs) zur Verfügung. Die einfachste Grundeinheit ist das Flipflop, für das ein genormtes Schaltzeichen gibt. Dargestellt wird es als Blockschaltbild mit zwei Feldern und den gegenüberliegenden Ein- und Ausgängen. Die beiden Felder sind durch eine gestrichelte Linie getrennt. Die Anschlüsse der Betriebsspannung bleiben weggelassen.
Für dieses Flipflop gelten die nachstehenden Vereinbarungen:
- Die Arbeitsweise wird mit den logischen Zuständen 1 (H) und 0 (L) beschrieben.
- Bei der Inbetriebnahme haben in der Grundform die Eingangszustände mit E1 = E2 = 0 keine Steuerwirkung.
- Die Ausgänge A1 und A2 haben immer entgegengesetzte Zustände.
- Bei E2 = 0 sorgt der Zustandswechsel des Eingangs E1 auf 1, dass der Ausgang A1 ebenfalls auf 1 schaltet. Dieser Vorgang wird als Setzen – Set bezeichnet. Mit A1 = 1 bleiben weitere Pegeländerungen am Eingang E1 wirkungslos.
- Der Zustand an A1 kennzeichnet den aktuellen Speicherzustand des Flipflops.
- Bei E1 = 0 sorgt der Zustandswechsel des Eingangs E2 auf 1, dass der Ausgang A2 ebenfalls auf 1 schaltet. Der Ausgang A1 muss dann auf 0 wechseln. Der Vorgang wird als Rücksetzen – Reset bezeichnet. Mit A2 = 1 bleiben Pegeländerungen an E2 wirkungslos.
Beim Einschalten der Betriebsspannung sollte das Flipflop einen definierten Grund- oder Ruhezustand einnehmen. Im Schaltsymbol ist die Grundstellung durch einen Balken am Ausgang für die logische 1 gekennzeichnet. Man unterscheidet zwischen der statischen und dynamischen Eingangssteuerung. Bei der statischen Steuerung liegen die High- oder Low Eingangssignale dauerhaft oder ausreichend lange mit gleichem Pegel an. Dynamische gesteuerte Eingänge reagieren auf eine Zustandsänderung, die Signalflanke beim Wechsel von Low auf High oder umgekehrt. Im Blocksymbol sind dynamische Eingänge durch eine Dreieckspitze gekennzeichnet. Das Bild zeigt die vier Normschaltzeichen.
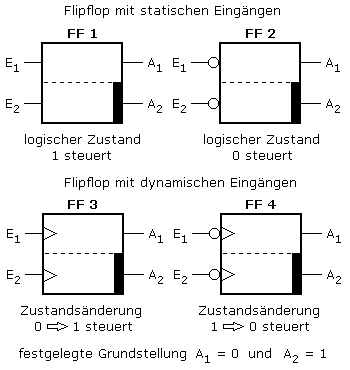
Diese Flipflops haben im Grundzustand die Ausgangspotenziale A1 = 0 und A2 = 1. Der logische Zustand 1 am Eingang E1 versetzt das statische FF 1 in den Arbeitszustand mit A1 = 1. Die Negationskreise an den Eingängen beim FF 2 zeigen an, dass es durch eine logische 0 am Eingang E1 in den Arbeitszustand gesetzt wird.
Beim Flipflop FF 3 erfolgt die Ansteuerung der dynamischen Eingänge mit steigender, positiver Signalflanke beim Wechsel von logisch 0 auf 1. Die dynamischen Eingänge mit Negationskreis beim FF 4 reagieren auf die fallende, negative Signalflanke beim Wechsel von 1 auf 0.
Nachfolgende Zustandsänderungen am selben Eingang wirken sich weder beim statisch gesteuerten Flipflop noch beim dynamisch gesteuerten Flipflop auf den zuvor gesetzten oder rückgesetzten Ausgang aus. Wirksam werden nur Pegelwechsel am anderen Eingang.
Eingangsverknüpfungen
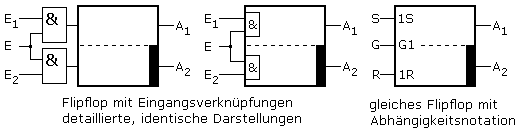
Flipflops können mehrere Eingänge haben, die durch eine logische UND beziehungsweise ODER Verknüpfung in Verbindung stehen und einen vorbereitenden Eingang bilden. Erst wenn die Vorbedingungen erfüllt sind, wird das Steuersignal am anderen Eingang ausgewertet. Bei vielen Flipflops sind beide Eingänge mit einem gemeinsamen Steuereingang, dem Takteingang verbunden.
Die Verknüpfungen werden durch Abhängigkeitsnotationen und Ziffern gekennzeichnet. Beim steuernden Eingang steht die Ziffer nach dem Buchstaben und beim gesteuerten Eingang davor. Mit Buchstaben werden bestimmte Abhängigkeiten notiert: G bedeutet UND-, V bedeutet ODER-, C bedeutet Steuer-Abhängigkeit, T steht für Toggle oder Umschalten; S steht für Set oder Setzen und R steht für Reset oder Zurücksetzen.
Das folgende Bild zeigt ein Flipflop mit Set und Reset und einen gemeinsamen durch UND verknüpften dritten Eingang. Signaländerungen können nur dann an den Ausgang gelangen, wenn der Pegel am dritten Eingang (E) auf High steht. Er bildet den einzigen (1) Steuereingang und diese Ziffer steht nach der Abhängigkeitsnotation G. Da sowohl S als auch R vom dritten Eingang (1) gesteuert werden, steht seine Zählnummer davor.
Flipflop-Gruppen entsprechend ihrer Ansteuerung
Alle Flipflops haben zwei stabile Zustände. Genannt wurden direkt gesteuerte Flipflops, wo die Ausgangszustände auf Pegeländerungen an den Eingängen reagieren. Es ist die Gruppe der nicht taktgesteuerten oder direkt gesteuerten Flipflops. Hierbei wird zwischen statischer und dynamischer Ansteuerung unterschieden. Die dynamische Steuerung kann von der steigenden oder fallenden Flanke ausgelöst werden.
Die taktgesteuerten Flipflops bilden eine weitere große Gruppe. Es sind Flipflops mit Vorbereitungseingängen. Oft ist es ein Zusatzeingang, der durch logische Verknüpfungen mit den anderen Eingängen verbunden ist. Er wird zum Takteingang, der das Umschalten des Flipflops bestimmt. Beim statischen Takteingang spricht man von Taktzustandssteuerung. Beim dynamisch steuernden Takteingang gelangt man zur Gruppe der taktflankengesteuerten Flipflops. Hier wird nochmals zwischen einer Einflanken- und Zweiflankensteuerung unterschieden. Bei der Einflankensteuerung erfolgt die Umschaltung entweder auf der steigenden oder fallenden Taktflanke. Die Zweiflankensteuerung schaltet sowohl auf der steigenden als auch der fallenden Taktflanke.
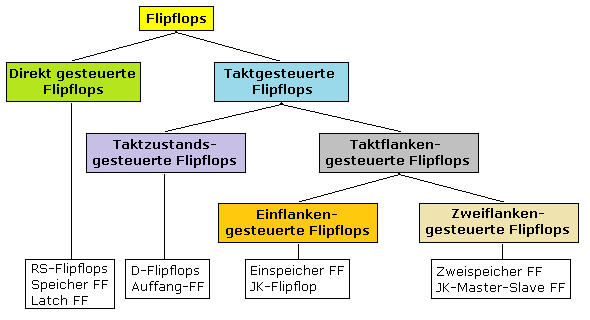
Die unterste Reihe nennt einige Beispiele zu den einzelnen Gruppen. Sie werden an anderer Stelle eingehender beschrieben. Zur ersten Gruppe gehören die RS-Flipflops. Es sind die Standardspeicher, die aus NAND- oder NOR-Gattern bestehen.