Funktionsprinzip dynamischer Mikrofone
Mikrofone wandeln Schallereignisse erst in mechanische Energie und anschließend in elektrische Energie um. Schall breitet sich im Medium Luft durch Schwingen der Luftmoleküle aus. Die im Ausbreitungsmedium entstehenden Druckänderungen regen eine im Schallfeld vorhandene eingespannte Membran zu mechanischen Schwingungen an. Beim dynamischen Tauchspulenmikrofon ist diese Membran mit einem Spulenkörper verbunden, der in einem statischen Magnetfeld schwingen kann. Nach dem Induktionsgesetz wird an den Spulenanschlüssen eine vom Schalldruck abhängige Wechselspannung generiert. Die Magnetfeldlinien durchsetzen die Drahtwindungen der Schwingspule senkrecht zur Richtung der Spulenbewegung. Die Spulenlänge ist klein im Vergleich zur für sie wirksamen Ausdehnung des Magnetfelds. Mikrofone sind akustoelektrische Wandler.
Wird ein Permanentmagnet in eine feststehende Spule hinein und heraus bewegt, so entsteht ebenfalls eine Induktionsspannung. Für Mikrofone ist dieses Bauprinzip ungeeignet, da die zu bewegende Masse zu groß und damit die Empfindlichkeit zu gering ist. Dieser Artikel beschreibt auch das Prinzip des Druckgradientenempfängers und des Bändchenmikrofons.
Das Induktionsgesetz zeigt in der allgemeinen Form \(\Delta U = - B \cdot I \cdot \Delta v\), dass die induzierte Wechselspannung ΔU direkt proportional zur Änderungsgeschwindigkeit Δv ist. Sie steht im direkten Zusammenhang zu den Druckänderungen, die von der Schallquelle ausgehen. Die Nutzspannung bei gleicher mechanischer Erregung ist höher, je größer die wirksame magnetische Flussdichte B des Magnetfelds ist und je mehr Windungen der Spule im Magnetfeld bewegt werden.
Tauchspulenmikrofon
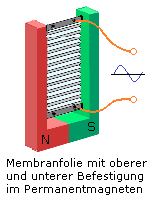
Bei diesem dynamischen Mikrofon bewegt sich die von Schallwellen angetriebene Spule in einem Permanentmagnetfeld. Das radialsymmetrische Magnetfeld entsteht in einem Topfmagneten mit zylinderförmigem inneren Pol und äußerem Polring. Die Spule ist fest mit einer dünnen Folienmembran verbunden. Sie ist am Außenrand der Mikrofonkapsel elastisch fixiert und hält die Spule zentriert im Luftspalt des Topfmagneten. Er hat in seiner Rückseite mindestens ein kleines Loch für den Druckausgleich. Diese Mikrofonkapsel ist im Mikrofongehäuse gedämpft gelagert und so weitgehend geschützt gegen das Einwirken mechanischer Störungen, die vom Trittschall und der normalen Handhabung entstehen können. Ein Tauchspulenmikrofon ist recht robust und als Handmikrofon auf einer Veranstaltungsbühne gut geeignet. Die Ausgangsimpedanz ist mit rund 200 Ω niederohmig und die Ausgangsspannung so hoch, dass zwischen Mikrofonkapsel und Mischpult kein Vorverstärker notwendig ist. Das Mikrofon benötigt keine eigene Spannungsversorgung.
Treffen Schallwellen auf die Membran auf, so versetzen sie die an ihr befestigte Spule in Schwingungen. Die Spule schneidet die sie umgebenden Magnetfeldlinien senkrecht. Im Spulendraht wirkt auf die frei beweglichen Elektronen die Lorentzkraft. Die gerichtete Elektronenverschiebung erzeugt an den Spulenanschlüssen eine proportionale Spannungsänderung. Die Bewegungsrichtung der Spule als Ursache, die Richtung des Permanentmagnetfelds als Vermittlung und die daraus folgende Richtung der Lorentzkraft als Wirkung stehen alle senkrecht zueinander.
Die UVW-Regel
Die UVW-Regel kann mithilfe des Daumens, Zeigefingers und Mittelfingers der linken oder rechten Hand anschaulich dargestellt werden. Der Daumen gibt die Richtung der Ursache (U) und der rechtwinklig abgespreizte Zeigefinger die Richtung der Vermittlung (V) an. Beide spannen eine Fläche auf. Auf ihr steht der rechtwinklig dazu abgespreizte Mittelfinger und weist in die Richtung der Wirkung (W). Mit den Fingern der linken Hand (Linke-Hand Regel) wird durch W die Lorentzkraft bestimmt. Es ist die Bewegungsrichtung der Elektronen und damit die physikalische Stromrichtung. Die technische Stromrichtung ist von Plus nach Minus definiert und wird mit den Fingern der rechten Hand (Rechte-Hand Regel) ermittelt.
Die folgende Grafik skizziert die Wirkung auf frei bewegliche Elektronen, wenn sich eine Leiterschleife senkrecht zum umgebenden Magnetfeld bewegt. Mit der UVW-Regel (Linke-Hand Regel) wird die Bewegungsrichtung der Elektronen (Lorentzkraft) im Leiter angezeigt. Die Ursache (U) ist die Bewegung der Leiterschleife. Die Richtung des Magnetfeldes von Nord nach Süd stellt die Vermittlung (V) dar. Die Bewegungsrichtung der Elektronen im Leiter ist die gesuchte Wirkung (W).
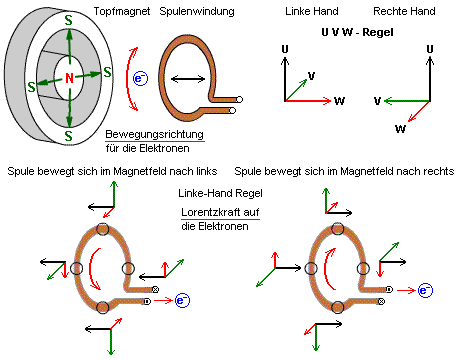
Das Magnetfeld des Topfmagneten verläuft radialsymmetrisch vom Nord- zum Südpol. Bewegt sich die Leiterschleife im Luftspalt des Magneten hin und her, so schneidet sie die Magnetfeldlinien senkrecht. An den vier gekennzeichneten Abschnitten der Leiterschleife wird mithilfe der UVW-Regel der linken Hand die Bewegungsrichtung der Elektronen ermittelt. Im linken unteren Bildteil weist die Bewegungsrichtung (Ursache) der Leiterschleife im Magnetfeld (Vermittlung) nach links und im rechten Bildteil ist die Bewegungsrichtung nach rechts umgekehrt. Die Lorentzkraft auf die frei beweglichen Elektronen weist in allen Abschnitten desselben Leiters in die gleiche Richtung. Ändert sich nur die Bewegungsrichtung, so kehrt sich die Polarität an den Enden der Leiterschleife um.
Im Ausbreitungsmedium wird der Ton einer bestimmten Frequenz durch periodische Druckänderungen transportiert. Im Zeitdiagramm dargestellt entsprechen die Druckänderungen einer Sinuswelle. Die Änderungsgeschwindigkeit des Schalldrucks ist im Bereich der Nulldurchgänge der Sinuskurve am größten und im Maximal- oder Minimalwert gleich null. Mathematisch beschrieben führt die Ableitung der Sinuskurve (Druckänderung) nach der Zeit zur Cosinuskurve (Geschwindigkeitsänderung). Das Tauchspulenmikrofon reagiert auf die Änderungsgeschwindigkeit und erzeugt an den Anschlüssen der Schwingspule eine dazu proportionale Ausgangsspannung. Schalldruckänderungen und die dadurch erzeugten Spannungsänderungen sind um 90° phasenversetzt.
Da sich der Blindwiderstand der Spule proportional mit der Frequenz ändert, ist die Impedanz der Kapsel nicht konstant. Verglichen mit einem Kondensatormikrofon ist der Übertragungsbereich eines dynamischen Tauchspulenmikrofons nicht so breitbandig und die Empfindlichkeit ist geringer. Zum einen muss der Schalldruck die Spulenmasse in Bewegung bringen und gegen die elektrische Arbeit der schwingenden Spule wirken. Das damit trägere Einschwingen wirkt sich auf das Impulsverhalten dämpfend aus.
Die Trägheit der Schwingspule bewirkt, dass höhere Frequenzbereiche weniger gut übertragen werden. Das verändert auch die Kugelcharakteristik des Druckempfängers zu höheren Frequenzen hin. Werden die eintreffenden Wellenlängen kleiner im Vergleich zum Membrandurchmesser, so nimmt der Anteil der reflektierten Schallwellen zu. Hohe Frequenzen, die von der Seite oder Rückseite einwirken, üben geringeren Druck auf die Membran aus. Diese Effekte verringern die Ausgangsspannung des Mikrofons. Vor der Membran überlagern sich Direktschall und Reflexionen und erzeugen einen Druckstau, der bei gleicher Phasenlage die Ausgangsspannung erhöht und gegenphasig mindert.
△