Steuerung und Regelung
Nicht nur in der Elektronik haben wir es mit Prozessen der Steuerungs- und Regelungstechnik zu tun. Fast alle in der Natur beobachtbaren Vorgänge sind voneinander abhängig. Sie erfolgen nicht spontan, sondern bilden eine Aktions-, Reaktionskette, die in eine Richtung gehen kann und in einen Endzustand führt. Komplexere Prozesse laufen in einer Art Kreislauf ab, der auf äußere Einflüsse angepasst reagiert und sich so eine lange Zeit selbst erhält. Es bestehen eindeutige Unterschiede zwischen einem Steuerungs- und Regelungsprozess, die im alltäglichen Sprachgebrauch weniger beachtet werden.
Steuerung
Die genormte Beschreibung nach DIN 19226 ist ersetzt durch DIN IEC 60050-351.
Die Steuerung ist der Vorgang in einem System, bei dem eine oder mehrere Größen als Eingangsgrößen andere Größen als Ausgangsgrößen aufgrund der dem System eigentümlichen Gesetzmäßigkeiten beeinflussen. Kennzeichen für das Steuern ist der offene Wirkungsweg oder ein geschlossener Wirkungsweg, bei dem die durch die Eingangsgrößen beeinflussten Ausganggrößen nicht fortlaufend und nicht wieder über dieselben Eingangsgrößen auf sich selbst wirken.
Die Steuerkette kann durch das folgende Blockdiagramm dargestellt werden.
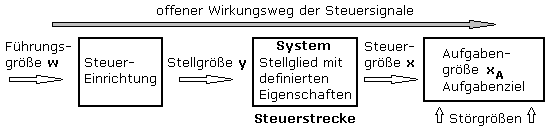
Die Steuereinrichtung und die Steuerstrecke bilden zusammen die Steuerkette. Sie liefert in einem offenen Wirkungsweg die Ausgangsgrößen. Das Aufgabenziel ist störabhängig, da vom Ausgang keine Rückführung auf den Eingang erfolgt, sodass einwirkende Störfaktoren vom System nicht ausgeglichen werden. Es kann nach mehreren Steuerungsarten unterschieden werden:
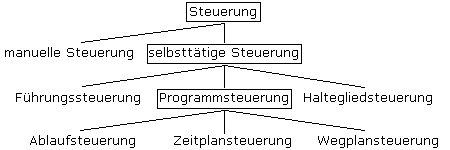
- Führungssteuerung
-
Es besteht ein fester Zusammenhang zwischen der Führungsgröße und der Steuer-(Ausgangs)größe.
Beispiele: Lautstärke, Bildhelligkeit, Farbkontrast bei Audio- und Videoabspielgeräten. - Haltegliedsteuerung
-
Die durch eine Führungsgröße erreichte Steuergröße bleibt auch nach dem Abschalten oder Wegfall der Führungsgröße erhalten, bis sie durch die Eingabe einer neuen Führungsgröße zurückgesetzt wird.
Beispiele: Eltako-Schaltungen mit Stromstoßrelais, Alarmanlagen, Flip-Flop-Schaltungen. - Zeitplansteuerung
-
Die Führungsgröße folgt einem Takt- oder Uhrensignal zeitabhängigen Programm.
Beispiele: Ampelsteuerung, Treppenlichtautomat, mechanische Stiftwalze. - Wegplansteuerung
-
Die Führungsgröße ist von der Stellung oder dem zurückgelegten Weg eines Gebers oder Sensors abhängig.
Beispiele: Nockenwellen, Kurvenscheiben, CNC-Steuerung bei Dreh- und Fräsmaschinen. - Ablaufsteuerung
-
Aufeinander folgende Einzelprogrammschritte, die nur dann gestartet werden, wenn durch Sensoren bestimmte Übergabeparameter erfüllt sind.
Beispiele: Waschmaschinen, Produktionsstraßen, Aufzüge.
Der Regelkreis
Die Normbeschreibung nach DIN 19226 ist ersetzt durch DIN IEC 60050-351.
Die Regelung, ist ein Vorgang, bei dem fortlaufend eine variable Größe, die Regelgröße (zu regelnde Größe), erfasst, mit einer anderen variablen Größe, der Führungsgröße, verglichen und im Sinne einer Angleichung an die Führungsgröße beeinflusst wird. Kennzeichen für das Regeln ist der geschlossene Wirkungsablauf, bei dem die Regelgröße im Wirkungsweg des Regelkreises fortlaufend sich selbst beeinflusst.
In der Regelungstechnik gibt es eine Reihe charakteristischer Bezeichnungen, deren Bedeutungen hier kurz beschrieben werden. Teilweise findet man in übersetzten Veröffentlichungen auch anderslautende Erklärungen oder Formelzeichen.
- Regelstrecke
- Es ist der Teil des Regelkreises, wo die zu regelnde Größe beeinflusst wird. Zur Regelstrecke gehören Stellglied, Stellort und Messort. Die Strecke endet endet am Messort (Messstelle), wo die Regelgröße gemessen wird.
- Stellglied
- Es ist eine Funktionseinheit der Regelstrecke, die sich an ihrem Eingang befindet und in den zu regelnden Masse- oder Energiefluss eingreift.
- Regeleinrichtung
- Die Regeleinrichtung beginnt am Messort und endet am Stellort. Die einzelnen Funktionseinheiten sind der Sollwertgeber, die Vergleichsstelle, das eigentliche Regelglied und der Steller.
- Steller
- Der Steller ist die ausführende Funktionseinheit der Regelung und gehört zur Regeleinrichtung. Er erhält vom Regelglied mit der Ausgangsgröße yr des Reglers die Information wie die Regelgröße x zu beeinflussen ist und bildet als Ausgangssignal die Stellgröße y.
- Sollwertgeber
- Er wird auch als Sollwerteinsteller bezeichnet und gibt die Führungsgröße w an die Vergleichsstelle weiter.
- Vergleichsglied
- An der Vergleichsstelle wird aus den momentanen Messwerten der Regelgröße und der Führungsgröße die Regeldifferenz e gebildet und als Eingangswert an das Regelglied gegeben.
- Regelglied
- Der eigentliche Regler wertet die Regeldifferenz aus und bildet die Ausgangsgröße yr des Reglers. Wird im Blockschaltbild der Regeleinrichtung der Steller nicht berücksichtigt, dann liefert der Regler direkt die Stellgröße y.
Die dem Regelkreis zugeordneten Größen haben nach DIN- und IEC-Norm teilweise unterschiedliche Formelzeichen, deren Bedeutung kurz beschrieben wird.
| Größe | Formel- zeichen |
Bedeutung | |
| DIN | IEC | ||
| Regelgröße | x | y | Ausgangsgröße der Regelstrecke, die der Führungsgröße angepasst werden soll. |
|---|---|---|---|
| Sollwert | xs | Es ist der momentane Einstellwert für die Führungsgröße den die Regelgröße möglichst genau erreichen soll. | |
| Führungsgröße | w | r | Es ist der Messwert des von außen zugeführten Sollwerts, der vom Regelkreis nicht beeinflusst wird und dem die Regelgröße möglichst genau folgen soll. |
| Rückführgröße | r | f | Es ist die zur Regelgröße x proportionale Messgröße, der zur Bildung der Regeldifferenz an die Regeleinrichtung zurückgeführt wird. |
| Istwert | xi | Es handelt sich um den zurückgeführten Messwert der Regelgröße, der beim Soll-Istwertvergleich die Regeldifferenz ergibt. ( e = xd = w − xi ) | |
| Regeldifferenz | e | e | Vergleichswert zwischen der Führungsgröße und der zurückgeführten Regelgröße ( e = w − x oder e = w − r ). |
| Stellgröße | y | m | Ausgangsgröße der Regeleinrichtung und Eingangsgröße der Stelleinrichtung (Regelstrecke). |
| Störgröße | z | (v) | Von außen wirkende Größen mit unerwünschter Beeinflussung des Regelkreises. |
Abweichend oder ergänzend zu dieser Aufstellung kann man in der Literatur zur Regelungstechnik noch weitere Begriffserklärungen finden:
- Istwert xi
- Es ist der momentane Wert der Regelgröße und wird als zurückgeführte Regelgröße verstanden.
- Sollwert: xs
- Bleibt die Führungsgröße wie im Fall der Festwertregelung zeitlich konstant, werden Sollwert und Führungsgröße oft gleichberechtigt verwendet. Zu einem gewählten Zeitpunkt und bei definierten Bedingungen ist der Sollwert der gewünschte Wert einer variablen Größe.
- Regelabweichung xw
- Es ist die im Vergleichsglied gebildete Differenz zwischen der Regelgröße und der Führungsgröße. Regelabweichung und Regeldifferenz haben den gleichen Betrag und unterscheiden sich nur durch das Vorzeichen. ( xw = x − w = r − w = −e )
- Eingangsgröße u
- Allgemeine Bezeichnung für das Eingangssignal eines Übertragungsglieds.
- Ausgangsgröße v
- Allgemeine Bezeichnung für das Ausgangssignal eines Übertragungsglieds.
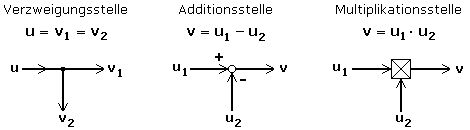
Genormte Darstellungen
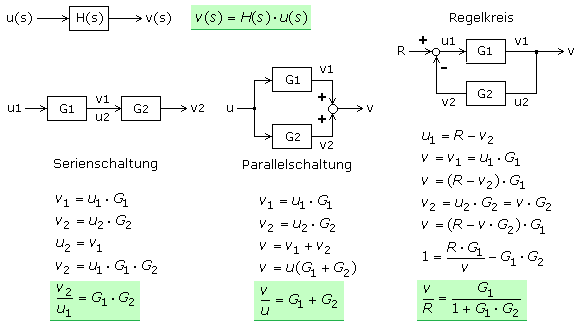
Die grafische Darstellung von Steuer- und Regelkreisen nutzt meistens Blockschaltbilder mit entsprechenden Verbindungswegen, die sich an allgemeine Normen halten. Einige wichtige Darstellungen werden nachfolgend gezeigt. Es werden die allgemeinen Bezeichnungen u und v für die Eingangs- und Ausgangsgröße verwendet.
In den Blockdiagrammen kann die Verknüpfung der einzelnen Abschnitte seriell und parallel erfolgen. Jeder Block ist durch seine Übertragungsfunktion G() charakterisiert. Der geschlossenen Regelkreis hat vom Ausgang zum Eingang eine Rückkopplung und eine Vergleichsstelle. Ein einfacher Funktionsblock kann auch davon abweichend durch H(s) beschrieben sein.
Zu einer Regelung gehört ein geschlossener Regelkreis mit den kontinuierlich ablaufenden Arbeitsschritten:
Messen – Vergleichen – Stellen.
Nach der Definition der Regelung soll eine bestimmte Regelgröße x auf einen gewünschten Sollwert, der Führungsgröße w gebracht und unabhängig von einwirkenden äußeren Störfaktoren z konstant gehalten werden. Diesen Ablauf zeigt das folgende vereinfachte Blockschaltbild eines Regelkreises.
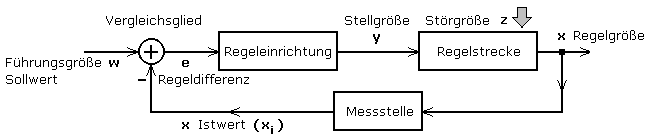
Damit der Regelkreis seiner Aufgabe x = w möglichst genau nachkommen kann, muss der aktuelle Wert der Regelgröße x gemessen werden. Er wird Istwert xi genannt und mit dem Sollwert, der Führungsgröße w verglichen. Der Vergleich liefert die Regeldifferenz e, nach der Beziehung e = w − x. Mit der Regelabweichung als Eingangsgröße erzeugt die Regeleinrichtung entsprechend einer ihr charakteristischen Übertragungsfunktion die Stellgröße y als Ausgangssignal und wirkt damit auf die Regelstrecke ein. Die Übertragungsfunktion des Reglers kann neben den notwendigen proportionalen Eigenschaften zusätzlich integrale und differenziale Anteile aufweisen.
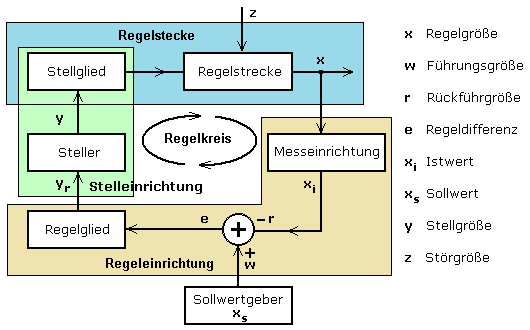
Der Regelvorgang wird durch das Einwirken der Störgröße z auf die Regelstrecke oder durch Verändern des Sollwerts, der Führungsgröße ausgelöst. Störungen können an allen Stellen des Regelkreises auftreten. Zur Regeleinrichtung zählen die Messeinrichtung, das Vergleichsglied, der eigentliche Regler und der Steller. In den meisten Fällen bildet die Eingangsschaltung des Regelglieds das Vergleichsglied. Die Regelstrecke ist der vom Regler beeinflusste Teil. Sie beginnt am Stellort und endet am Messort. Das Stellglied zählt zur Regelstrecke. Die Blockgrafik zeigt den Regelkreis in einer erweiterten ausführlichen Darstellung.
Der Regelkreis kann nur dann optimal arbeiten, wenn die Arbeitsbereiche aller Parameter aufeinander abgestimmt sind und eingehalten werden. Es gibt einen Führungsbereich Wh für die Führungsgröße, der zum Regelbereich Xh passen muss, um eine sinnvolle Regeldifferenz zu bilden. Hierbei ist der zu erwartende Störbereich Zh mit zu berücksichtigen. Der Stellbereich Yh muss das Stellglied sicher ansteuern und darf es nicht übersteuern.
Die Regelkreise können nach Handregelung und selbsttätiger Regelung unterschieden werde. Da bei der Handregelung der Mensch Bestandteil der Regeleinrichtung ist, wird das Ergebnis verglichen mit der selbsttätigen Regelung nicht optimal sein. Bei fast allen Regelkreisen gibt daher der Mensch nur den Sollwert vor und verändert ihn nur selten. Weiterhin wird nach stetiger und unstetiger Regelung unterschieden.
- Stetige Regelung
- Die zu regelnde Größe wird kontinuierlich durch eine Messeinrichtung erfasst und als Istwert an die Vergleichsstelle zurückgeführt. Regelglied und Stellglied arbeiten stufenlos und halten die Regelgröße konstant.
- Unstetige Regelung
- Die beiden wichtigsten Vertreter sind die Zweipunkt- und Dreipunktregelung. Die Messeinrichtung kann in Art einer Hysterese nur das Über- oder Unterschreiten der Regelgröße erfassen. Für die Regeleinrichtung oder das Stellglied reicht ein Schaltrelais oder Schaltventil. Das Stellsignal einer Phasenanschnittsteuerung ist unstetig, erzeugt jedoch einen zeitlichen Mittelwert und wird daher eher der stetigen Regelung zugeordnet.
- Festwertregelung
- Der Sollwert und die daraus folgende Führungsgröße sind konstant. Die Regelung gleicht nur den Einfluss der Störgrößen aus. Ein bekanntes Beispiel dazu ist eine geregelte Konstantspannungs- oder Konstantstromquelle.
- Folgeregelung
- Die Führungsgröße variiert und kann sich auch innerhalb der Regelzeit ändern. Die Regelung folgt den Sollwertvorgaben und gleicht auch auftretende Störfaktoren aus. Als Beispiel lassen sich numerisch oder mit Bahnsteuerung laufende CNC-Werkzeugmaschinen nennen.
- Zeitplanregelung
- Die Führungsgröße ist eine kontinuierliche oder unstetige Funktion der Zeit. Die Regelung folgt den Sollwertvorgaben und gleicht auftretende Störgrößen mit aus.
Die Regelkreise können in allen Teilen analog arbeiten. Moderne Industrie- und Prozessregler arbeiten kombiniert analog und digital und verfügen über die dazu notwendigen AD- und DA-Wandler. Meistens lassen sich mehrere Messwerte gleichzeitig erfassen verarbeitet. Es sind programmierbare PID-Regler, die oft universell für unterschiedliche Regelkreise einsetzbar sind.
Soll ein Regelkreis optimal arbeiten, so muss man das Zeitverhalten der Regelstrecke kennen. Mit den ermittelten Parametern kann dann ein passendes Regelglied dimensioniert werden. Das Zeitverhalten oder der Frequenzgang kann mit Rechenverstärkern elektronisch nachgebildet werden. Bei Analogreglern sind Operationsverstärker besonders gut geeignet. Sie haben einen sehr hohen Eingangswiderstand und belasten somit nicht die Sensoren. Sie können sowohl im Differenzbetrieb, als auch invertierend und nicht invertierend arbeitet. Es sind Gleich- und Wechselspannungsverstärker mit einer sehr niedrigen und daher gut belastbaren Ausgangsimpedanz. Bei Gleichtaktansteuerung oder ohne Eingangssignal bleibt ihr Ausgangssignal bei null. Mit nur wenigen passiven Bauteilen in der Außenschaltung lassen sich alle analogen Reglertypen mit proportionalen, integralen und differenzialen Eigenschaften einzeln oder kombiniert aufbauen.